Magnitudes vectoriales
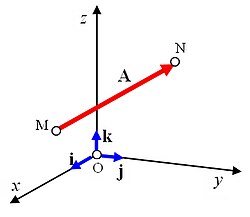
Representación gráfica de una magnitud vectorial, con indicación de su punto de aplicación y de los versores cartesianos.
Representación de los vectores.
Frente a aquellas magnitudes físicas, tales como la
masa, la
presión, el
volumen, la
energía, la
temperatura, etc; que quedan completamente definidas por un número y las unidades utilizadas en su medida, aparecen otras, tales como el
desplazamiento, la
velocidad, la
aceleración, la
fuerza, el
campo eléctrico, etc., que no quedan completamente definidas dando un dato numérico, sino que llevan asociadas una dirección. Estas últimas magnitudes son llamadas
vectoriales en contraposición a las primeras llamadas
escalares.
Las magnitudes vectoriales quedan representadas por un ente matemático que recibe el nombre de vector. En un
espacio euclidiano, de no más de tres dimensiones, un vector se representa por un segmento orientado. Así, un vector queda caracterizado por los siguientes elementos: su longitud o
módulo, siempre positivo por definición, y su
dirección, la cual puede ser representada mediante la suma de sus
componentes vectoriales ortogonales, paralelas a los ejes de coordenadas; o mediante
coordenadas polares, que determinan el ángulo que forma el vector con los ejes positivos de coordenadas.
5 6
Se representa como un segmento orientado, con una dirección, dibujado de forma similar a una "flecha". Su longitud representa el módulo del vector, la recta indica la dirección, y la "punta de flecha" indica su sentido.
1 2 3
Notación
Las magnitudes vectoriales se representan en los textos impresos por letras en
negrita, para diferenciarlas de las magnitudes escalares que se representan en
cursiva. En los textos manuscritos, las magnitudes vectoriales se representan colocando una flecha sobre la letra que designa su módulo (el cual es un
escalar).
- Ejemplos
 ... representan, respectivamente, las magnitudes vectoriales de módulos A, a, ω, ... El módulo de una magnitud vectorial también se representa encerrando entre barras la notación correspondiente al vector:
... representan, respectivamente, las magnitudes vectoriales de módulos A, a, ω, ... El módulo de una magnitud vectorial también se representa encerrando entre barras la notación correspondiente al vector:  ...
...- En los textos manuscritos se escribe:
 ... para los vectores y
... para los vectores y  ... o
... o  ... para los módulos.
... para los módulos.
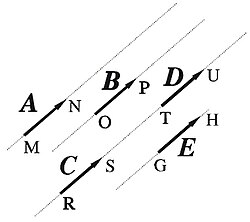
Cuando convenga, se representan la magnitud vectorial haciendo referencia al origen y al extremo del segmento orientado que la representa geométricamente; así, se designan los vectores representados en la Figura 2 en la forma

, ... resultando muy útil esta notación para los vectores que representan el desplazamiento.
Además de estas convenciones los
vectores unitarios o versores, cuyo
módulo es la unidad, se representan frecuentemente con un circunflejo encima, por ejemplo

.
Clasificación de vectores
Según los criterios que se utilicen para determinar la igualdad o
equipolencia de dos vectores, pueden distinguirse distintos tipos de los mismos:
- Vectores libres: no están aplicados en ningún punto en particular.
- Vectores deslizantes: su punto de aplicación puede deslizar a lo largo de su recta de acción.
- Vectores fijos o ligados: están aplicados en un punto en particular.
Podemos referirnos también a:
- Vectores unitarios: vectores de módulo unidad.
- Vectores concurrentes o angulares: son aquellas cuyas direcciones o líneas de acción pasan por un mismo punto. También se les suele llamar angulares por que forman un ángulo entre ellas.
- Vectores opuestos: vectores de igual magnitud y dirección, pero sentidos contrarios.1 En inglés se dice que son de igual magnitud pero direcciones contrarias, ya que la dirección también indica el sentido.
- Vectores colineales: los vectores que comparten una misma recta de acción.
- Vectores paralelos: si sobre un cuerpo rígido actúan dos o más fuerzas cuyas líneas de acción son paralelas.
- Vectores coplanarios: los vectores cuyas rectas de acción son coplanarias (situadas en un mismo plano).
Componentes de un vector
En coordenadas cartesianas, los vectores unitarios se representan por

,

,

, paralelos a los ejes de coordenadas
x,
y,
z positivos. Las componentes del vector en una base vectorial predeterminada pueden escribirse entre paréntesis y separadas con comas:
o expresarse como una combinación de los vectores unitarios definidos en la base vectorial. Así, en un sistema de coordenadas cartesiano, será
Estas representaciones son equivalentes entre sí, y los valores
ax,
ay,
az, son las componentes de un vector que, salvo que se indique lo contrario, son
números reales.
Una representación conveniente de las magnitudes vectoriales es mediante un
vector columna o un
vector fila, particularmente cuando están implicadas operaciones
matrices (tales como el cambio de base), del modo siguiente:
Con esta notación, los vectores cartesianos quedan expresados en la forma:
El
lema de Zorn, consecuencia del
axioma de elección, permite establecer que todo espacio vectorial admite una
base vectorial, por lo que todo vector es representable como el producto de unas componentes respecto a dicha base. Dado un vector solo existen un número finito de componentes diferentes de cero.
Representación gráfica de los vectores
Aunque hay quien no recomienda el uso de
gráficos para evitar la confusión de conceptos y la inducción al error, sin investigación que lo corrobore, también es cierto que la memoria se estimula con mejores resultados. Para ello:
- Se llama vector a la representación visual con el símbolo de flecha( un segmento y un triángulo en un extremo).
- La rectitud visual de una flecha o curvatura de la misma, no la hace diferente en símbolo si los dos extremos permanecen en el mismo lugar y orden.
- El que una flecha cierre en sí misma, indica la ausencia de efectos algebraicos.
- Para visualizar la suma de vectores se hará encadenándolos, es decir, uniendo el extremo que tiene un triángulo (final) del primer vector con el extremo que no lo tiene (origen) del segundo vector manteniendo la dirección y distancia, propias al espacio, de sus dos extremos, ya que estas dos cualidades los distingue visualmente de otros vectores.
- Los escalares se representarán con una línea de trazos a modo, exclusivamente, de distinción ya que no siempre pertenecen al espacio de vectores.
Se examinan cada uno de los casos que aparecen en la definición de las operaciones suma de vectores y producto por un escalar:
Suma de vectores
La definición suma de vectores en el orden u+v produce otro vector, es como encadenar, siempre visualmente, un vector u y luego uno v. Diremos que u+v se simplifica como un vector w o que w descompone como suma de vectores u y v.
- 1) Decir que u+v=v+u, es exigir que las dos sumas simplifiquen en el mismo vector, en negro. Véase que en física los vectores en rojo simulan la descomposición de fuerzas ejercidas por el vector negro en su origen, y se representa con un paralelogramo.
- 2) Decir que u+(v+w)=(u+v)+w, es exigir que las simplificaciones de sumas de vectores puedan ser optativas en cualquier cadena de sumas.
- 3) Decir que existe un vector cero (elemento neutro) tal que u+0=u, equivale a exigir que exista un vector incapaz de efectuar, mediante la suma, modificación alguna a todos los vectores.
- 4) Decir que u+(-u)=0, es exigir la existencia de un elemento opuesto, -u, que sumado a u simplifique en un vector cero.
Producto por un escalar
La definición producto por un escalar

produce otro vector; es como modificar el extremo final del vector
u, siempre visualmente.
Por un lado la representación del producto en el caso que el
cuerpo de los escalares sea

modifica, visualmente, la longitud de la imagen del vector, quedando ambos siempre superpuestos; por otro lado las representaciones en el caso que

además de modificar la longitud, también agrega
rotaciones, para facilitarlas visualmente considérense centradas en el origen del vector, siendo estas modificaciones un poco más expresivas, visualmente, pero no más fáciles que en el caso real:
- a)Decir que a(bu)=(ab)u, es exigir que los productos encadenados a(b(u)) pueden simplificarse como uno, c=ab, luego (ab)u queda como cu.
- b) Decir que existe el escalar 1 tal que 1u=u, equivale a decir exista un escalar incapaz de efectuar, mediante producto, modificación alguna a todos los vectores.
- c) Decir que a(u+v)=au+av, es exigir la propiedad distributiva respecto la suma vectorial.
- d) Decir que (a+b)u=au+bu, es exigir la propiedad distributiva respecto la suma escalar.
Para el caso real se han de eliminar las rotaciones de los ejemplos anteriores.






![\mathbf{a} = \begin{bmatrix}
a_x\\
a_y\\
a_z\\
\end{bmatrix}
\qquad
\mathbf{a} = [ a_x\ a_y\ a_z ]](https://upload.wikimedia.org/math/c/0/2/c02407847783cfc5ef04e2c0adbbb3d6.png)
![{\mathbf i} = [1\ 0\ 0],\ {\mathbf j} = [0\ 1\ 0],\ {\mathbf k} = [0\ 0\ 1]](https://upload.wikimedia.org/math/0/d/e/0deb3595fd231616d7001755bb3c5430.png)


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}